Math: Intermediate
Updated: July 2024Introduction
Here we continue down the path of mathematics in robotics. This will build on top of material in the general math article, and it contains information that robotics students should at least be familiar with by the time they graduate.
Statistics
This is a section on discrete statistics and probabilities.
Independant/Dependent Rolls
Standard Deviation
Trend Lines
Physics
This is a short section on early education Physics. All topics are ideal case scenarios with frictionless cows and the like.
Newtons Equations
Torque
Tension
Elastic Collisions
PIDs
An incredibly common mechanism in robotics is something called a PID Loop, pronounced P-I-D and not pid. PID Loops are a tool to more smoothly transition between values reducing chances of mechanical damage, and mitigate any power system turbulence. Below is a diagram of a PID loop with a feed forward component.
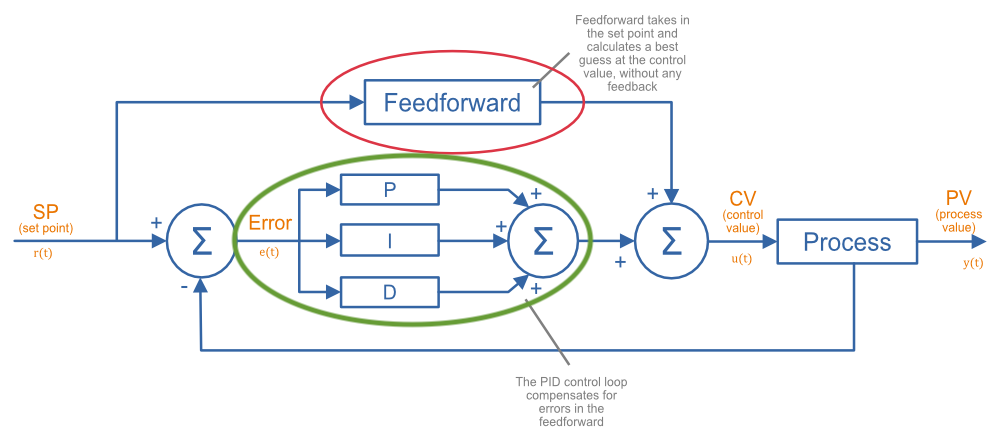
There are two important sections in this diagram, the first is the 3 channels of P, I, and D circled in green. These stand for Proportional, Integral, and Derivative, respectively. The second important part is the feed forward box circled in red. All 4 components are added together (that's what the Σ in the circle means) and become the final output value. That value could be volts, amps, or something else entirely. Lets briefly talk about each term.
- - P(roportional) takes some proportion of the difference between the current value, and the desired value. It's easiest to pretend this is some percentage for now, and a 10% P value will move the current value 10% of the remaining error. Eventually this tiny value will be too small to affect the motors, and effectively becomes 0. This is similar to Zeno's Paradox. If your P value is greater than 100% you get oscillation, less than 100% will stabilize over time. Greater than 200% will oscillate and diverge! The lower the value the longer it takes to stabilize. Actual proportional values are rarely ever in percentage form, however it is easier to think of them that way.
- - I(ntegral) takes into account the gap between what it is, and what is missing. This is a calculus concept, that describes the "area under the curve" and is frequently described as an accumulation of error. This is handy because eventually the Proportional value stops being able to change the output with incredibly small numbers. So the integral component accumulates those small values into a larger value instead.
- - D(erivative) is another calculus concept. If you add an Integral value into the PID loop, you may find that your system starts off oscillating significantly. This component looks at how sharply the system is changing and limits the strength of it.
- - Feed Forward is a constant value put into the final sum. This can be a value representing static/kinetic friction, the force of gravity, or some other known force opposing the system. It can also be used as an arbitrary constant to seed the PID loop with a starting value.
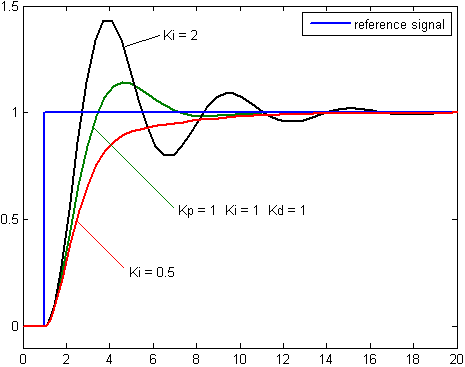
The goal is to take a potentially turbulent or imprecise system, and have it self correct over time. Below is a rough approximation of a PID system stabilizing over time. The first line we want to pay attention to is the red one, and consider the low Ki value with the Kp of 1. Here the Ki is low enough to be insignificant. As the Kp is raised to 2 (the black line) you start to see oscillation. That's not good! We introduce our third term, the Kd value, to tell it to not spike up so sharply, especially near our target. This produces a curve that still corrects the error in the system up to that point, but stabilizes to the target value faster than any of the other curves.
Here's another animated example that heavily uses the proportional and integral component creating oscillation, and then relies on a large derivative component to prevent the oscillations from causing any damage and smoothing out the curve incredibly quickly.
Lets try an interactive demo then!
P:
I:
D:
Lastly, it's important to remember that the units of these values matter, and everything discussed here is hypothetical. The actual values used are typically in some practical units, like Volts or Amps. It's always best when tuning to start with the documentation. Pick a deliberately low value for P, adjust as desired, and then move through the P, I, and then D values as needed. Try to reserve feed forward values for situations with a known resistance, like rotational friction when moving sideways, or the force of gravity on a lift, or use it to balance the system in practice when behavior is not consistent in all contexts.
More PID resources:
- NI (Examples with LabVIEW)
- Wevolver (General Knowledge)
- mbedded.ninja (Code snippets are in C and C++)